Introduction
SH-V2G-Simulator is a toolset for solving optimal scheduling problems involving a large number of electric vehicles (EVs) participating in the Vehicle-to-Grid (V2G) program.
Main Features
The simulator allows users to easily configure large-scale charging scenarios, apply different scheduling strategies, and analyze grid-level and user-level performance metrics through automated visualization and reporting tools.
Especially, this simulator provides:
an integrated environment that combines various V2G scheduling algorithms into a unified platform
support for both centralized and distributed scheduling schemes
a flexible configuration system based on JSON and spreadsheets, offering rich customization options
a user-friendly interface for scenario generation, parameter setting, and result visualization
automated multi-scenario simulation and analysis tools for Monte Carlo or scenario-based evaluations
comprehensive visualization and analysis tool for evaluating grid-level and user-level performance indicators
animation features that visualize the dynamic behavior of EV fleets and grid interactions (to be implemented).
The distinctive feature of this program is that it allows EVs to freely arrive at and leave the chargers, while the online optimization algorithm continuously operates by taking such dynamics into account. To facilitate the feature, the toolset provides with
scenarioclass describing EVs’ behaviorsa receding horizon algorithm (that can run forever)
prediction of future scenario for improving performance (to be implemented)
Also, the fully distributed algorithm is included in this toolset. It can be easily deployed on each charger or EV with only minor modifications.
Overall Architecture
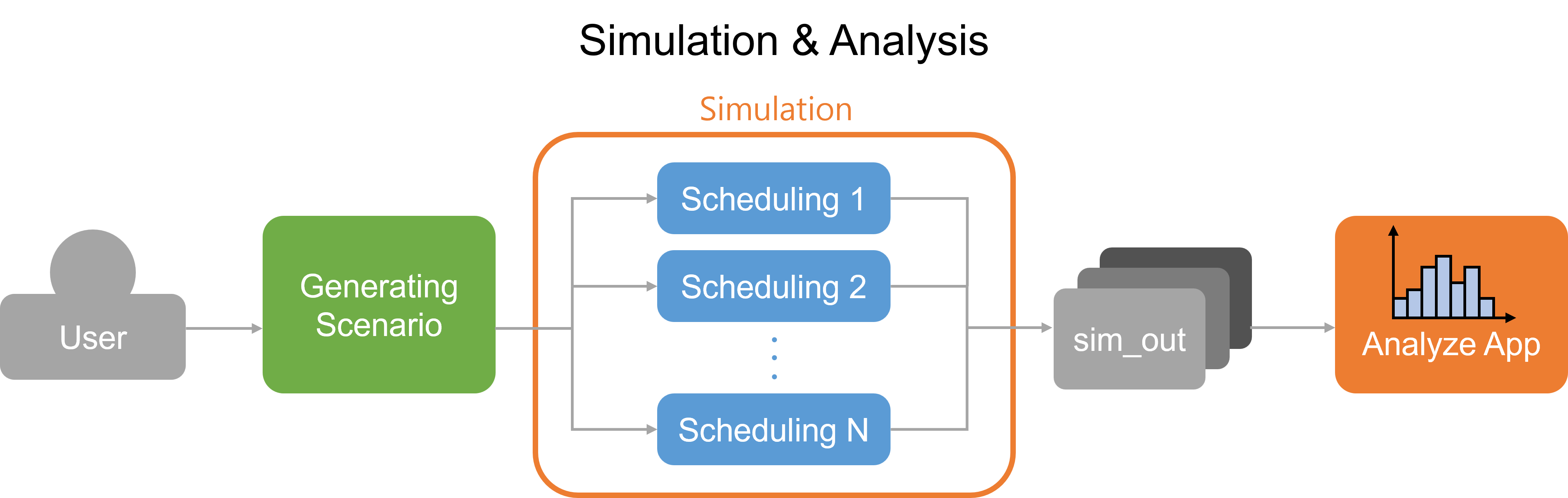
The key processing flow of the simulator is as follows.

First, the user generates a scenario that models a real-world V2G scheduling problem. The scenario includes various parameters, such as the total time period, the number and arrangement of chargers, and the desired energy reference of each EV. In this work, we define a scenario format suitable for modeling large-scale V2G scheduling problems which is convenient for users.
Next, the scenario becomes an input into a schedule algorithm that solves the problem. In this work, we offer various types of algorithms, including centralized and distributed approaches, as well as algorithms that solve the problem using complete scenario information or only current time information.
This work not only provides various optimization algorithms, but also offers multi-algorithm, multi-scenario simulations. Specifically, users are able to run multi-algorithm simulations under the same scenario, as well as simulations across multiple scenarios that are randomly sampled from the same distribution. Moreover, visualization and analysis tools are provided so that users can compare and analyze the performance of various algorithms. The overall workflow is as follows:
Version
The current version is 0.9. Last update is October 2025.
Language
The current version runs in the MATLAB environment. A Python version is under development.
Credit
Sunghyun Koo
Seokho Jeong
Jinwook Heo
Yunjeong Yang
Seungbeom Lee
Hyungbo Shim
Supported by
Dr. Jinsung Kim
Dr. Soojeong Hyeon
Dr. Jiyeon Nam
Background
Our laboratory has been conducting research on V2G scheduling optimization over the past several years, resulting in multiple publications addressing fully distributed scheduling and future prediction. The simulator presented in this work integrates these research outcomes into a unified, executable framework.
Papers related to the project are:
3. S. Koo, S. Jeong, J. Heo, H. Shim, and J. Kim, “Decentralized future prediction with a large number of V2G chargers for real-time optimal charging scheduling,” to be submitted.
4. J. Heo, J. G. Lee, and H. Shim, “Initialization-free distributed PI algorithm for constraint-coupled optimization,” to be submitted.
Acknowledgment
This work was supported by Hyundai Motor Company under a research grant. We sincerely thank Hyundai Motor Company for their generous support and collaboration. “SH” in the name of this toolset stands for Seoul National University and Hyundai Motor Company.
License and Disclaimer
This program is released under the Creative Commons Attribution 4.0 International License (CC BY 4.0). You are free to use, modify, and distribute this software under the terms of this license.
All contents and opinions expressed in this software are solely those of the Control and Dynamic Systems Laboratory (CDSL), Seoul National University, and Hyundai Motor Company bears no responsibility or liability for any use, modification, or outcome derived from this software.